Stores the skeleton data.
The skeleton is represented as a set of joints, each of which has its own position and orientation. If pairs of adjacent joints are connected by imaginary "bones", you can get a simplified model of a real human skeleton. Then, the orientation of the joint will be consistent with the orientation of the outgoing "bone".
The skeleton scheme is shown in the picture below.
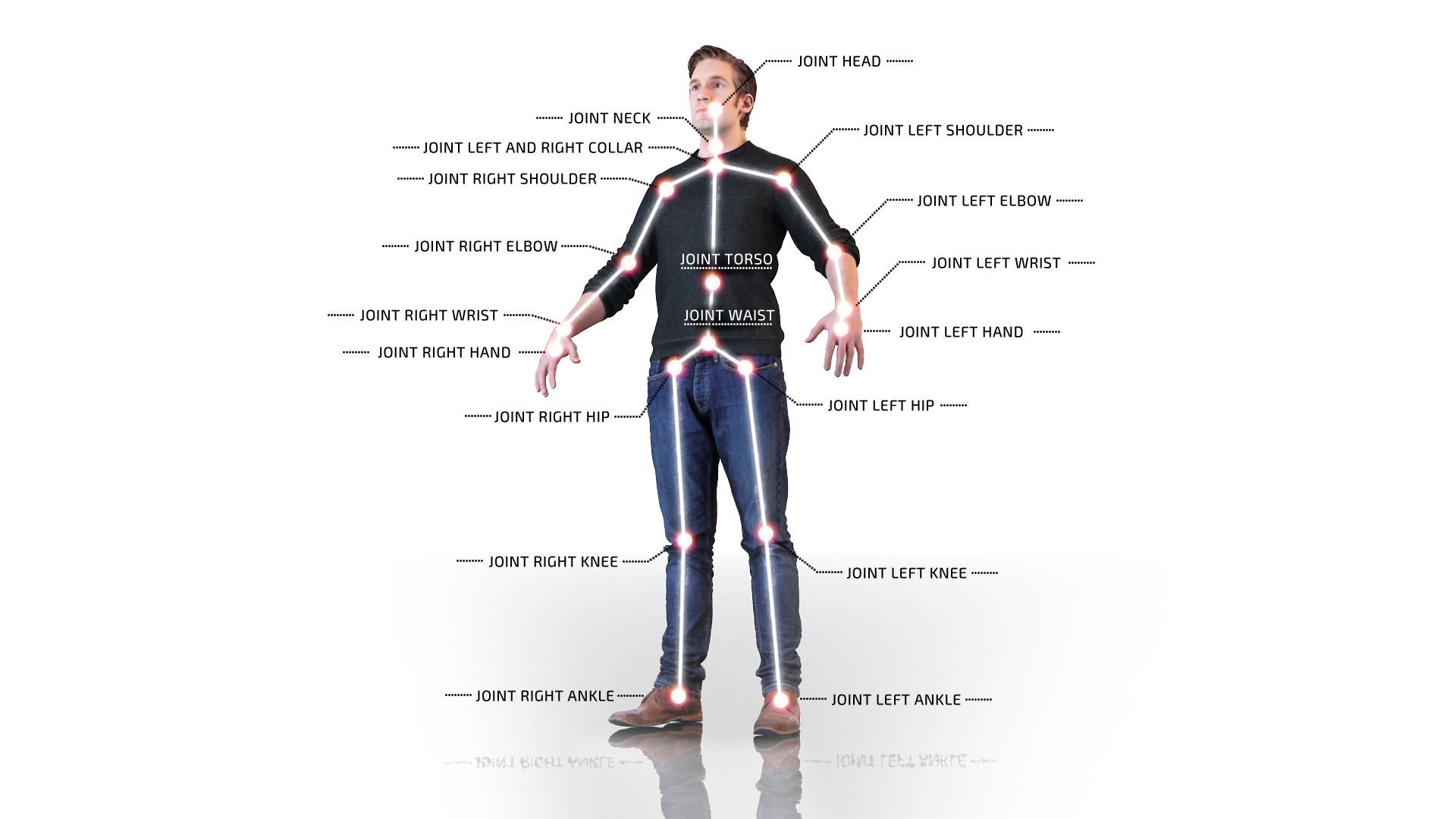
Skeleton scheme
Joint orientation is represented in the form of rotation matrix. In a T-pose, the rotation matrices for all joints are equal to an identity matrix (see the picture below). Rotations for wrists, feet and head are always identical.

T-pose

 1.8.6
1.8.6 
