 |
Nuitrack
1.11.2
3D Skeleton Tracking Middleware
|
Stores the data of the skeleton. More...
#include <Skeleton.h>
Public Attributes | |
| int | id |
| User Id. The same as other(UserTracker, HandTracker, GestureRecognizer) modules uses. | |
| std::vector< Joint > | joints |
| Array of joints. Where each index is ::JointType. | |
Stores the data of the skeleton.
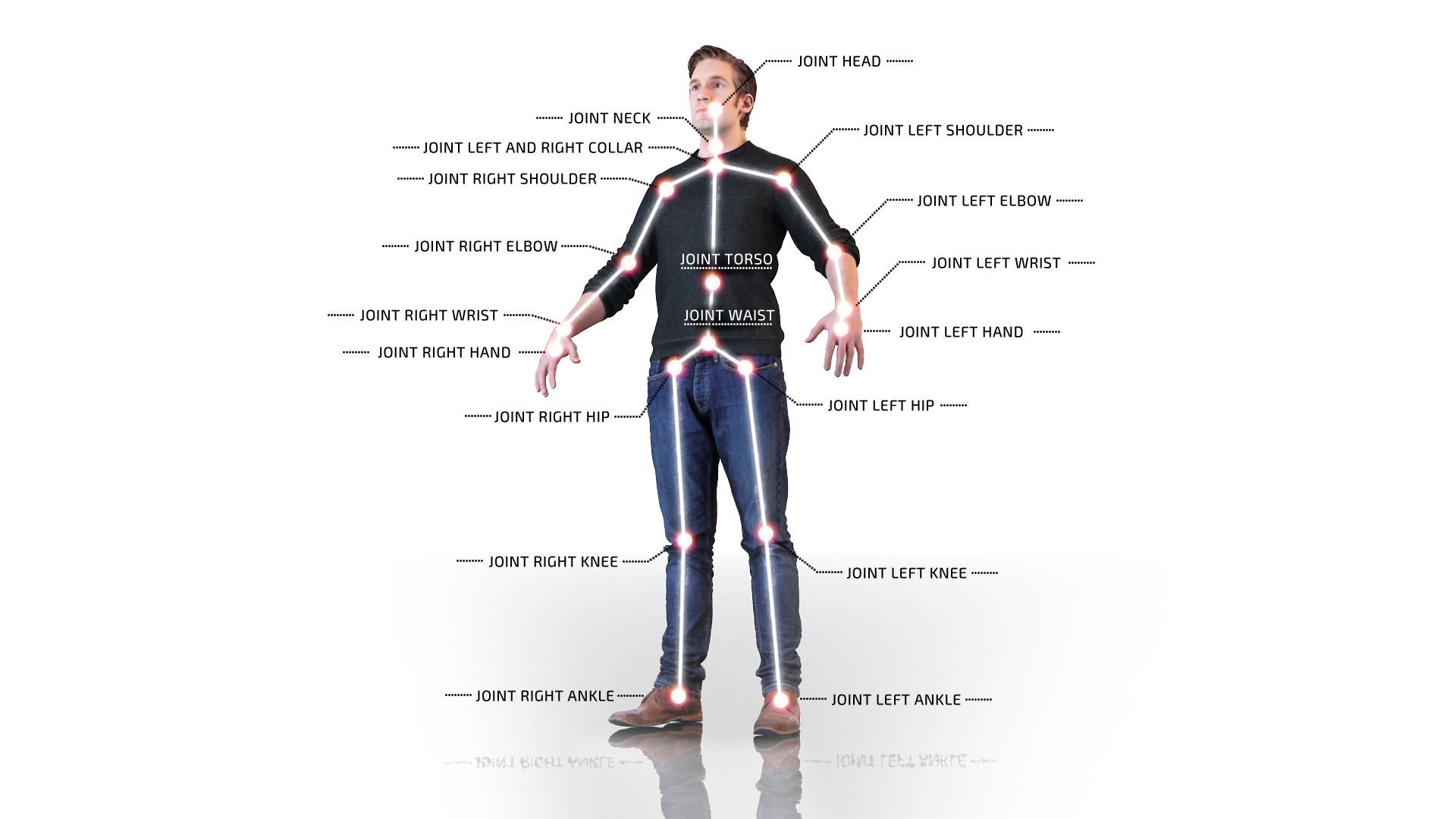
The skeleton is represented as a set of joints, each of which has its position and orientation. If pairs of adjacent joints are connected by imaginary "bones", you can get a simplified model of a real human skeleton. Then the orientation of the joint will be consistent with the orientation of the outgoing "bone".
The skeleton scheme is shown in the picture below.

 1.8.6
1.8.6 
